Researchers at the Bristol Robotics Laboratory and the University of Bristol have recently developed a new soft robotic skin-like sensor that is based on fluidic transmission. This sensor, presented at the second IEEE International Conference on Soft Robotics (RoboSoft), could have interesting applications in a variety of fields, ranging from robotics to virtual reality (VR).
“Integrating sensors in robotic hands is a difficult task because often, we need to squeeze many components into a limited space,” Gabor Soter, one of the researchers who carried out the study, told TechXplore. “Our idea was to transmit the sensory signals to other parts of the body, where there is more space for the sensing and processing hardware.”
Skinflow, the sensor developed by Soter and his colleagues, is partly inspired by biological mechanisms observed in spiders. Spiders are able to transmit hydraulic pressure to different parts of their bodies for actuation purposes. In other words, they can generate pressure inside their bodies and transmit this energy to their legs in order to move them.
The researchers tried to reproduce this mechanism by combining liquid-filled soft silicone chambers with optical sensors that measure pressure, bending and vibration. Skinflow has three key components: a soft skin filled with colored liquid, a display and a camera. When it is mechanically stimulated, the volume of its silicone chambers changes, and this change is transmitted onto its display via an incompressible, colored liquid.
“Due to interaction with the skin, the volume of Skinflow’s chambers change and this displaces the colored liquid,” Soter explained. “The liquid displacement is measured by a camera and we use image processing algorithms to quantify this change. This way, we can back calculate the location and intensity of the user’s interaction with the robotic skin.”
The touchpad developed using Skinflow. Credit: Soter et al.
Skinflow sensors are remarkably low-cost, scalable and safe to use in human environments. In their study, the researchers presented three possible implementations for their sensor. First, they used it to create a soft button array with four pressure-sensitive buttons.
They also used it to build a 3-D soft touchpad that consists of two sensor layers oriented at 90 degrees to each other, which both have eight macrochannels filled with colored liquid. In this implementation, Skinflow was used to measure the position and intensity of a user’s touch.
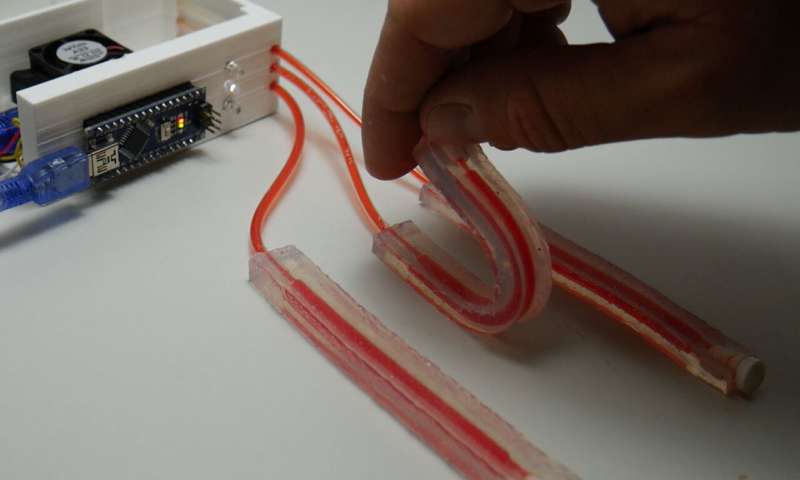
Finally, the researchers integrated the sensor with a smart vision camera and microcontroller. They then connected three soft bend sensors to a device’s processing unit and used them to control the brightness of three LED lights in real-time by bending them.
“Skinflow could have many applications including virtual reality, robotics, healthcare, smart homes, wearable tech and tele-manipulation,” Soter said. “It is also a very promising technology for applications where standard electronic components cannot be used due to electromagnetic interference, for example in magnetic resonance imaging (MRI) scanners, or radioactivity, for example in nuclear power plants.”
In the future, the sensor developed by Soter and his colleagues could aid the development of a vast array of innovative and smart technologies. The researchers are currently experimenting with Skinflow and using it to develop new wearable and human-interaction devices.
